近日,中國科學院沈陽自動化研究所機器人學研究室微納米課題組設計開發了一款基于仿生肌肉驅動與嵌入式柔性感知的軟體機器魚,相關成果發表于機器人領域1區Top期刊IEEE Transactions on Robotics(T-RO)。

軟體機器魚的仿生機制
作為自然界進化了億萬年的產物,魚類的高效游動行為主要和高靈敏度的側線感知系統以及高度發達可控的肌肉驅動系統密切相關。相關研究表明,魚體兩側的肌肉主要分為白肌和紅肌,其中白肌提供爆發力,紅肌提供耐力。并且在游動過程中,白肌的響應速度會相對更快。魚類正是通過感知-驅動系統的協同作用,及時感知周圍環境的變化,自適應調整不同部位肌肉的激活強度和次序,進而調整身體的運動學和游動方式實現最優推進。
受此啟發,研究人員提出了基于仿生人工肌肉驅動的驅感一體化多模態軟體機器魚設計方法,在多驅動單元協同控制策略、嵌入式柔性感知系統、環境自適應智能切換三個方面取得了突破:①協同控制:機器魚以鯖魚為仿生原型,由3D打印的柔性仿生結構和集成多種驅動單元與傳感元件的一體化軟體驅動器組成。其中,軟體驅動器為多層的柱狀結構,由壓縮彈簧、介電彈性體(DE)薄膜和柔性電極構成。類似魚類脊柱的壓縮彈簧為機器魚提供支撐,多層柔性薄膜模擬于魚的肌肉組織,為機器魚提供形變和動力。②柔性感知:為了模擬魚類的肌肉側線系統并實現同步驅動和傳感,研究團隊提出利用和驅動器相同的本體材料,設計并開發了高精度的柔性應變傳感器并首次集成到機器魚中,可幫助機器魚實時感知游動狀態和周圍流體環境變化,并自適應的切換到最佳的游動模態。③環境適應:通過協同控制多仿生肌肉單元的激勵幅值和次序,機器魚可以成功復現自然魚類的多種游動模態,并適應不同的游動環境。例如C-type 1模式適合在狹窄空間作業,C-type 2模式適合在水中快速游動,C-type 3模式適合湍流環境,而S-type更適合低雷諾數的粘度環境下游動。機器魚可以利用嵌入式柔性傳感元件實時感知周圍環境變化并自適應切換到最佳游動模態實現有效推進。相較同類軟體水下機器人,該機器魚首次實現驅動-感知-控制一體化,具有多種游泳模式數量(4種)與感知能力。
沈陽自動化研究所團隊長期關注仿生與類生命機器人的相關研究,積極推動機器人技術與生命科學的融合,該工作得到了國家重點研發計劃、國家自然科學基金,中國科學院穩定支持基礎研究領域青年團隊計劃、中國科學院青年創新促進會以及機器人學國家重點實驗室項目的支持。(來源:中國科學院沈陽自動化研究所)
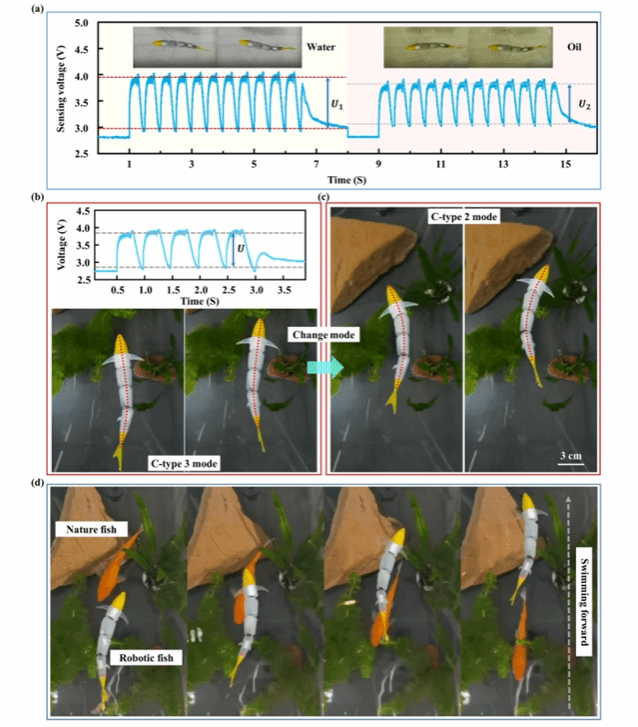
機器魚在不同環境下的游動特性
相關論文信息:https://ieeexplore.ieee.org/document/10848317
 官方微信
官方微信

